SLAM (Simultaneous Localization and Mapping ,即时定位与地图构建),是机器人通过对各种传感器数据进行采集和计算,生 成对其自身位置姿态的定位和场景地图信息的系统。SLAM技术对于机器人的运动和交互能力十分关键。
SLAM系统通常包含多种传感器和多种功能模块。按照核心的功能模块区分,目前常见的机器人SLAM系统可分为两种形式:基于激 光雷达的SLAM(激光SLAM)和基于视觉的SLAM(V-SLAM)。激光SLAM目前发展比较成熟、应用广泛,未来多传感器融合的SLAM 技术将逐渐成为技术趋势,取长补短,更好地实现定位导航。
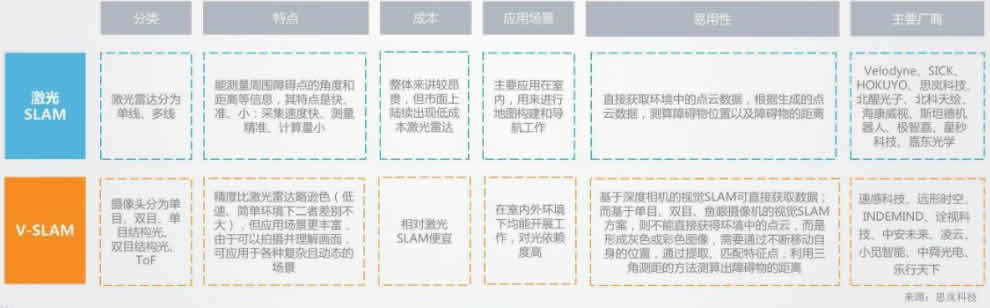
摘自:《2020中国服务机器人产业发展研究报告》
舵机是步态服务机器人的核心零部件和成本构成,是包含电机、传感器、控制器、减速器等单元的机电一体化元器件
人工智能技术支持的图像采集可以显著帮助扫描过程实现自动化,还可以重塑工作流程,最大限度地减少与患者的接触,为成像技术人员提供最佳保护
腾讯优图实验室高级研究员Louis在分享了自适应缺陷数据,业务场景下的神经网络训练方法
为决策树模型是一个具有比较好的可解释性的模型,以决策树为代表的规则模型在可解释性研究方面起到了非常关键的作用
神经网络模型本身其实并不是一个黑箱,其黑箱性在于我们没办法用人类可以理解的方式理解模型的具体含义和行为
神经网络的敏感性分析方法可以分为变量敏感性分析、样本敏感性分析两种,变量敏感性分析用来检验输入属性变量对模型的影响程度,样本敏感性分析用来研究具体样本对模型的重要程度
通过机械机构实现机械手到工具的动力传递,无需外部控制及供能,对机器人的避障路径规划影响极小
非接触式检测平台FluSense由麦克风阵列和热成像摄像机组成,用于捕捉不同的候诊室人群行为,包括咳嗽和语言活动以及候诊室病人数量
应用于MIS的触觉传感器主要是基于电学或光学原理开发的,应该是小尺寸和圆柱形的,可在导管的管身或尖端集成
MIS 和RMIS触觉传感器最常用的传感原理是基于电气的传感器。这些触觉传感器进一步分为压阻型、压电型和电容型传感器
马库斯系统性地阐述了对当前AI研究界的批判,从认识科学领域中针对性地给出了11条可执行的建议
记忆增强的图神经网络对短期的商品语境信息建模,并使用共享的记忆网络来捕捉商品之间的长期依赖,对多个模型进行了对比,在Top-K序列推荐中效果极佳


